OpenBevo
Introduction
What is it?
This robot is a 1/3 scale robot of the University of Texas at Austin's Mascot 'Bevo'
Abstract
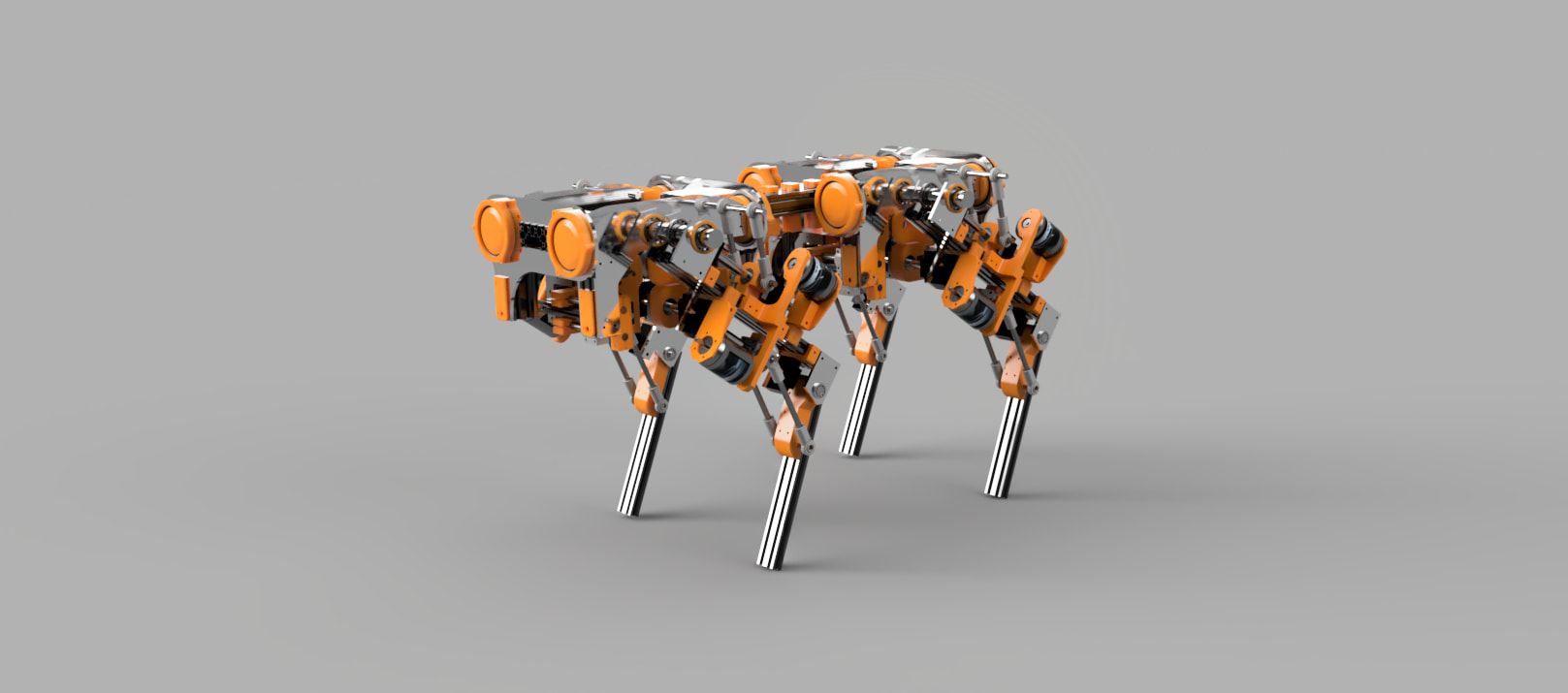
This project has multiple inspirations, most notably Boston Dynamics— a company pushing the bounds robotics by designing robust new animal like robots. By combining cutting edge electronics, sophisticated mechanical designs, and complex software they are able to create revolutionary robotic products. Many engineering hobbyists have gone as far to attempt to design their own DIY forms of Boston Dynamics “Spot” robot, and have created open source files to support a community developed design. We wish to develop our own form of robot which takes a twist on the “Spot” robot, combining a bit of University of Texas at Austin culture. Specifically, we wish to an open source Longhorn robot. We have yet to finish designing the head of this robot, which is why it is not seen in the header picture. However, this robot will be capable of walking, running, and interacting with its surroundings. We wish to create a mechanical and basic electrical framework for which Seniors Mechanical and Electrical Engineers can work to further develop it in the future. To be able to create a UT open source design for which engineering as well as any other disciple and work to create an inspiring feat of technology.
Why do I want to build this?
For engineering students, the type of design Boston Dynamics develops is inspiring, and creates enormous desire to be able to work at their company. However, since what Boston Dynamics does is so niche and the cost of their robots is in the hundreds of thousands of dollars, the ability for students are actively work on such robots is underdeveloped. While there are organizations at the University of Texas at Austin that support Robotic development, their budgets are limited and simply do not have the bandwidth to support such a project of this caliber. Organizations such as Texas Inventionworks strives to provide students with the experience and know-how of utilizing equipment that is at the forefront of rapid prototyping and industrial design. While this in itself is already an inspiring reason for students to want to invest more of their time to learning everything Texas Inventionsworks, it simply is not enough. With the enormous amount of workload engineering classes provide, the ability for students to want to dedicate time towards other “interesting” organizations remains a difficult decision. However, one way we can alleviate and potentially mitigate this problem is put inspiring projects like OpenBevo in front of students, a sight which shouts to students “look what I can do at the Texas Inventionworks studio! I need to be in there!”. It is sights like this that when students tour the University of Texas at Austin, they are reminded that the engineering that students start here, truly does indeed change the world. What I want more than anything is to inspire students to be the best engineers they possibly can, and I feel the best way to do that is to inspire them with cool interesting projects that they can get their hands dirty with!
What is it?
This robot is a 1/3 scale robot of the University of Texas at Austin's Mascot 'Bevo'
Abstract
This project has multiple inspirations, most notably Boston Dynamics— a company pushing the bounds robotics by designing robust new animal like robots. By combining cutting edge electronics, sophisticated mechanical designs, and complex software they are able to create revolutionary robotic products. Many engineering hobbyists have gone as far to attempt to design their own DIY forms of Boston Dynamics “Spot” robot, and have created open source files to support a community developed design. We wish to develop our own form of robot which takes a twist on the “Spot” robot, combining a bit of University of Texas at Austin culture. Specifically, we wish to an open source Longhorn robot. We have yet to finish designing the head of this robot, which is why it is not seen in the header picture. However, this robot will be capable of walking, running, and interacting with its surroundings. We wish to create a mechanical and basic electrical framework for which Seniors Mechanical and Electrical Engineers can work to further develop it in the future. To be able to create a UT open source design for which engineering as well as any other disciple and work to create an inspiring feat of technology.
Why do I want to build this?
For engineering students, the type of design Boston Dynamics develops is inspiring, and creates enormous desire to be able to work at their company. However, since what Boston Dynamics does is so niche and the cost of their robots is in the hundreds of thousands of dollars, the ability for students are actively work on such robots is underdeveloped. While there are organizations at the University of Texas at Austin that support Robotic development, their budgets are limited and simply do not have the bandwidth to support such a project of this caliber. Organizations such as Texas Inventionworks strives to provide students with the experience and know-how of utilizing equipment that is at the forefront of rapid prototyping and industrial design. While this in itself is already an inspiring reason for students to want to invest more of their time to learning everything Texas Inventionsworks, it simply is not enough. With the enormous amount of workload engineering classes provide, the ability for students to want to dedicate time towards other “interesting” organizations remains a difficult decision. However, one way we can alleviate and potentially mitigate this problem is put inspiring projects like OpenBevo in front of students, a sight which shouts to students “look what I can do at the Texas Inventionworks studio! I need to be in there!”. It is sights like this that when students tour the University of Texas at Austin, they are reminded that the engineering that students start here, truly does indeed change the world. What I want more than anything is to inspire students to be the best engineers they possibly can, and I feel the best way to do that is to inspire them with cool interesting projects that they can get their hands dirty with!
WHAT DOES IT DO?
The way we are going about designing our robot is to have it not only mimic the movement of a dog, but also provide it the means up interacting with its surrounding environment. This robot will have the ability to walk, run, and potentially everything a dog is capable of. Using sophisticated electronics and algorithms the dog will have full awareness of objects around it as well as a sense of location where it is. From this it will be able to move throughout a room. The carrying capacity of this robot is very large, and potentially has the ability to move very large objects.
WHY IS THIS SIGNIFICANT?
For such a project to be completed within a relatively low budget and by undergraduate students is a significant achievement for each department. It marks a large possibility towards further course integration between the different disciplines. Because we are creating a robust electro-mechanical frame with open source code, we are paving the way for other research to be conducted on this frame for the university to use.
WHAT IS TECHNICALLY CHALLENGING?
Given the level of abstraction we are seeking to apply to this robot each subsection of it holds its own challenges. From a mechanical perspective, we need to design a robust and rigid chassis as well as an armature system to handle the distributed weight of the E-chassis. Another mechanical challenge is in terms of designing the models to get the kinematics that models a dog’s movement. From a Hardware electrical perspective, the challenge is being able to properly handle to stringent power requirements of each of the motors and making sure adequate measures are taken when dealing with the high voltage distribution of our 54V power system. Designing an animal like robot especially on this scale is a very difficult mechanical, electrical, and software feat. It requires plenty of complex design considerations as well as a myriad of analysis and simulation.
The way we are going about designing our robot is to have it not only mimic the movement of a dog, but also provide it the means up interacting with its surrounding environment. This robot will have the ability to walk, run, and potentially everything a dog is capable of. Using sophisticated electronics and algorithms the dog will have full awareness of objects around it as well as a sense of location where it is. From this it will be able to move throughout a room. The carrying capacity of this robot is very large, and potentially has the ability to move very large objects.
WHY IS THIS SIGNIFICANT?
For such a project to be completed within a relatively low budget and by undergraduate students is a significant achievement for each department. It marks a large possibility towards further course integration between the different disciplines. Because we are creating a robust electro-mechanical frame with open source code, we are paving the way for other research to be conducted on this frame for the university to use.
WHAT IS TECHNICALLY CHALLENGING?
Given the level of abstraction we are seeking to apply to this robot each subsection of it holds its own challenges. From a mechanical perspective, we need to design a robust and rigid chassis as well as an armature system to handle the distributed weight of the E-chassis. Another mechanical challenge is in terms of designing the models to get the kinematics that models a dog’s movement. From a Hardware electrical perspective, the challenge is being able to properly handle to stringent power requirements of each of the motors and making sure adequate measures are taken when dealing with the high voltage distribution of our 54V power system. Designing an animal like robot especially on this scale is a very difficult mechanical, electrical, and software feat. It requires plenty of complex design considerations as well as a myriad of analysis and simulation.
Current Progress
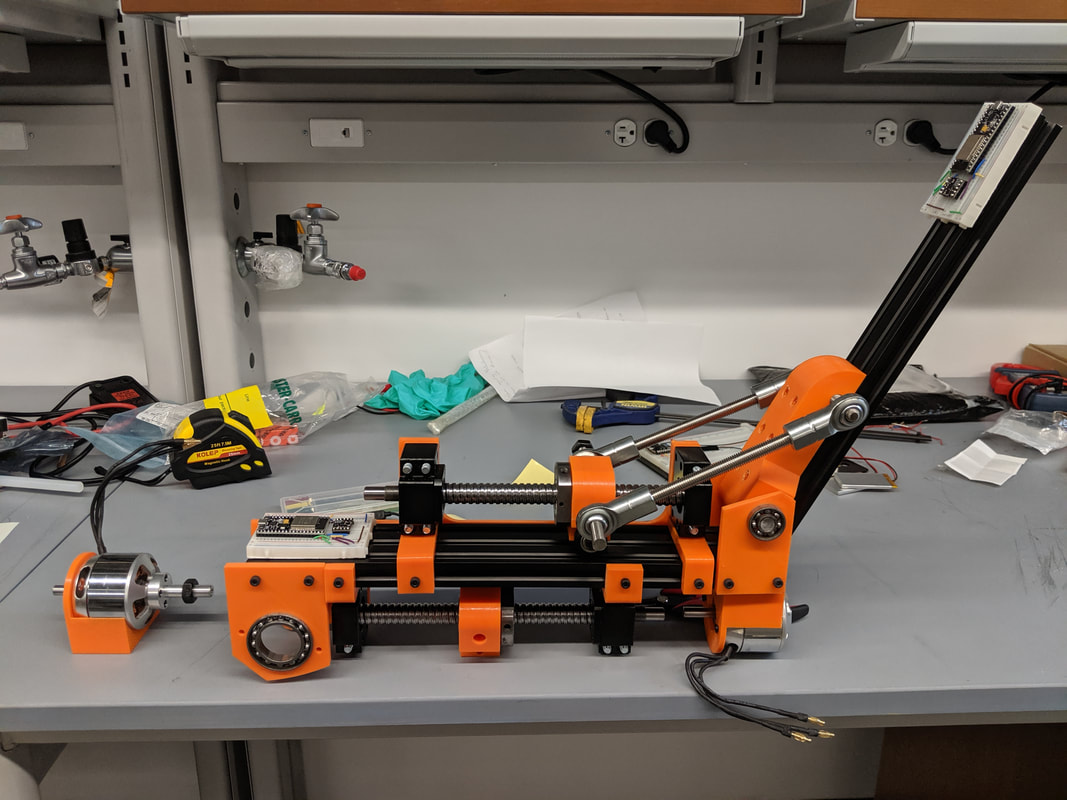
[10/20/2019] Completed Single Leg
Using the cut Aluminum Extrusion from before and some 3D printed parts I began to assemble OpenBevo's 1st leg! You may notice that there are two breadboard on the leg which is just for another project I am currently working on, which is for leg angle tracking using a Quaternion Mathematical model. In the actual leg we would have the motor directly mounted there.
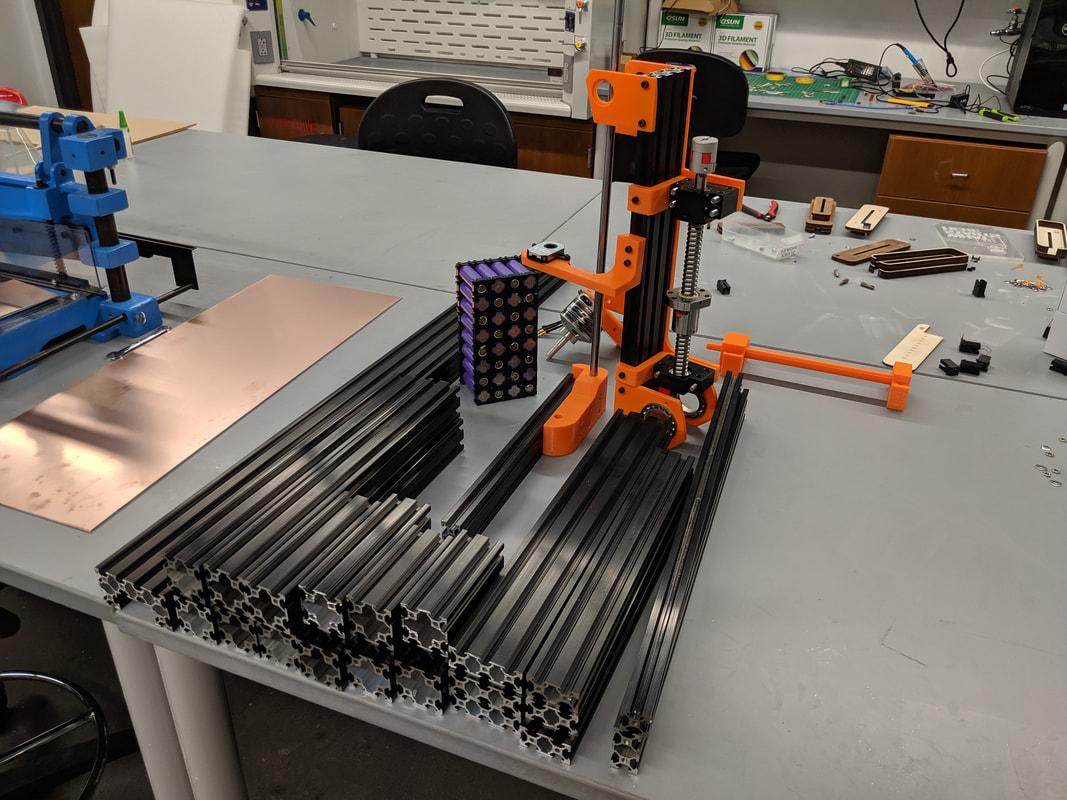
[10/13/2019] Cutting the Stock Down to Length
Most of my aluminum extrusion came in this week and I got straight to cutting it down to length using my metal cutting miter saw.